Mask R-CNN 源码解读
跟踪一下 Detectron.pytorch Mask R-CNN train 和 inference ¡的流程
Mask R-CNN 是在 Faster R-CNN 基础上把 RoIPool 替换为 RoIAlign,即使用 bilinear interpolation (双线性差值)方式把 feature map 缩小为固定大小(如 7 x 7 ),所以理解 Faster R-CNN 是基础。
Faster R-CNN, 除了论文,在网上找到的最详细的文章是 Object Detection and Classification using R-CNNs
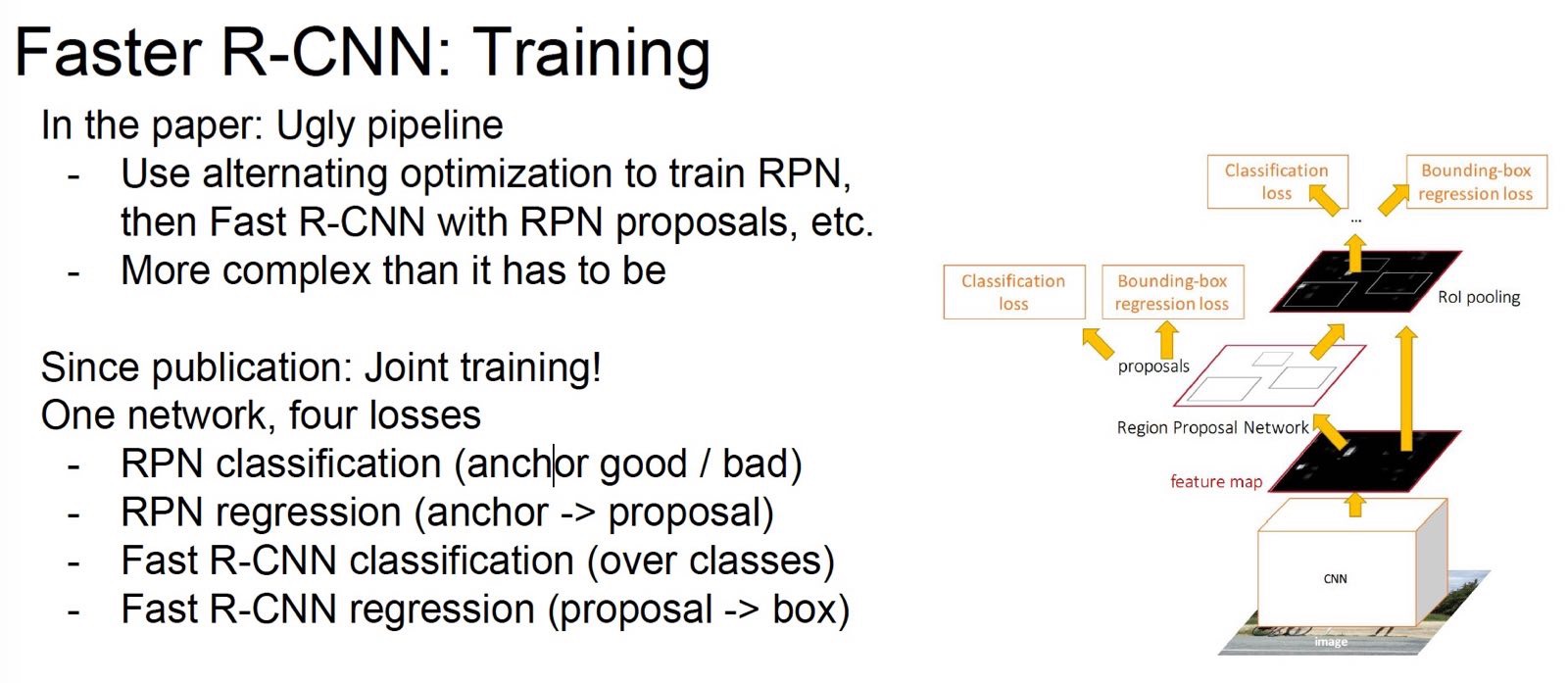
分为 RPN 网络和 R-CNN 网络。RPN 输出可用的 proposals, 其中 classification 用来分类 anchor box ,可以分为 foreground(比如 > 0.5)和 background(比如 < 0.5), regression 将 anchor box 回归修正成 roi proposals,然后在 ROIPool(或 ROIAlign) 层,extract 成固定大小的 feature map(比如 7 x 7)
inference
整个 inference 的代码封装的比较好
# load config
dataset = datasets.get_coco_dataset()
cfg.MODEL.NUM_CLASSES = len(dataset.classes)
cfg_from_file('configs/baselines/e2e_mask_rcnn_R-50-C4_1x.yaml')
cfg.MODEL.LOAD_IMAGENET_PRETRAINED_WEIGHTS = False # Don't need to load imagenet pretrained weights
assert_and_infer_cfg()
# load model
maskRCNN = Generalized_RCNN()
checkpoint = torch.load('/home/work/liupeng11/code/Detectron.pytorch/models/e2e_mask_rcnn_R-50-C4_1x.pth', map_location=lambda storage, loc: storage)
net_utils.load_ckpt(maskRCNN, checkpoint['model'])
maskRCNN.eval()
maskRCNN = mynn.DataParallel(maskRCNN, cpu_keywords=['im_info', 'roidb'], minibatch=True, device_ids=[0])
# load image
img_path = "/home/work/liupeng11/code/Detectron.pytorch/demo/sample_images/img1.jpg"
im = cv2.imread(img_path)
# detect bouding boxes and segments
from core.test import im_detect_bbox, im_detect_mask, box_results_with_nms_and_limit, segm_results
scores, boxes, im_scale, blob_conv = im_detect_bbox(maskRCNN, im, cfg.TEST.SCALE, cfg.TEST.MAX_SIZE, None)
scores, boxes, cls_boxes = box_results_with_nms_and_limit(scores, boxes)
masks = im_detect_mask(maskRCNN, im_scale, boxes, blob_conv)
cls_segms = segm_results(cls_boxes, masks, boxes, im.shape[0], im.shape[1])
cls_keyps = None
# save detected image
name = 'test'
output_dir = '/home/work/liupeng11/code/Detectron.pytorch/tmp'
vis_utils.vis_one_image(
im[:, :, ::-1], # BGR -> RGB for visualization
name,
output_dir,
cls_boxes,
cls_segms,
cls_keyps,
dataset=dataset,
box_alpha=0.3,
show_class=True,
thresh=0.7,
kp_thresh=2,
ext='jpg',
)
关键代码在 im_detect_bbox 中,这一部分是 Faster-RCNN 检测 bouding boxes, mask 分割在 im_detect_mask 中
im_detect_bbox
在 inference 时, maskRCNN 的 forward 方法返回 cls_score, bbox_pred 以及 RPN 网络的 rois,不涉及 mask 网络,所以此时的 maskRCNN 是一个 Faster R-CNN 网络
return_dict['rois'] = rpn_ret['rois']
return_dict['cls_score'] = cls_score
return_dict['bbox_pred'] = bbox_pred
maskRCNN 的 forward 可以简化成如下过程:
# prepare input and model
pil = Image.open(img_path).convert('RGB')
trans = transforms.Compose([
transforms.Resize((800, 600)),
transforms.ToTensor()
])
x = Variable(torch.unsqueeze(trans(pil), 0))
x = x.cuda()
m = maskRCNN.module
m.eval()
# feature_map
blob_conv = m.Conv_Body(x)
# RPN network
rpn_conv = F.relu(m.RPN.RPN_conv(blob_conv), inplace=False)
rpn_cls_logits = m.RPN.RPN_cls_score(rpn_conv)
rpn_bbox_pred = m.RPN.RPN_bbox_pred(rpn_conv)
rpn_cls_prob = F.sigmoid(rpn_cls_logits)
# genrete proposals (rois)
im_info = Variable(torch.Tensor([[800, 600, 1]]))
rpn_rois, rpn_rois_prob = m.RPN.RPN_GenerateProposals(rpn_cls_prob, rpn_bbox_pred, im_info)
rpn_ret = {'rpn_cls_logits': rpn_cls_logits, 'rpn_bbox_pred': rpn_bbox_pred, 'rpn_rois': rpn_rois, 'rpn_roi_probs': rpn_rois_prob}
rpn_ret['rois'] = rpn_ret['rpn_rois']
# bouding box network
box_feat = m.Box_Head(blob_conv, rpn_ret)
cls_score, bbox_pred = m.Box_Outs(box_feat)